
The main unit is now built and looks like this.
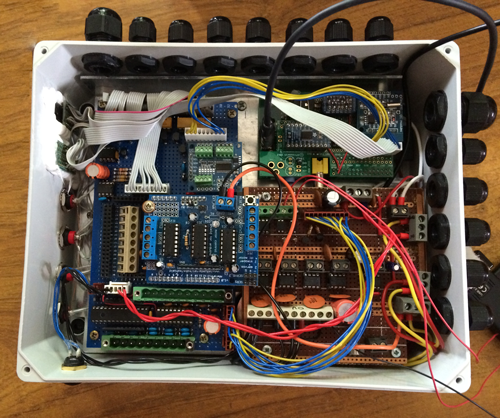
All boards are now fitted. There was a small problem that the Arduino board fouled the power drive board, so a bit of creative thinking with different length plastic posts provided the solution. This is not ideal and it makes it "interesting" to get the main board in and out when the power and data cables on the Arduino are considered, but it all fits and importantly, nothing goes bang.
On the left is the main control board with the Adafruit motor control board on top, all cabling is in place and the PWM controller is fitted.
Out to the right is the computer controlled USB hub, we can power up and down the power pin on the USB connector to simulate a USB insertion and removal, this allows us to power off the USB devices (like the Webcam) when we don't need them, so that we can save some power.
